Introduction
This application shows a demo of the TI Stereo Disparity Engine (SDE) hardware accelerator (HWA). The demo takes as input a sequence of input 8b or 16b gray scale left+right pair images in .bmp file format for 8b and raw .bin file format for 16b. Each pair of frames is run through Stereo Disparity OpenVX node. The stereo disparity map computed by SDE node are mapped based on a color palatte and output to files in .bmp format.
Supported plaforms
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
| Support | YES | YES | YES | J721e / J721S2 / J784S4 |
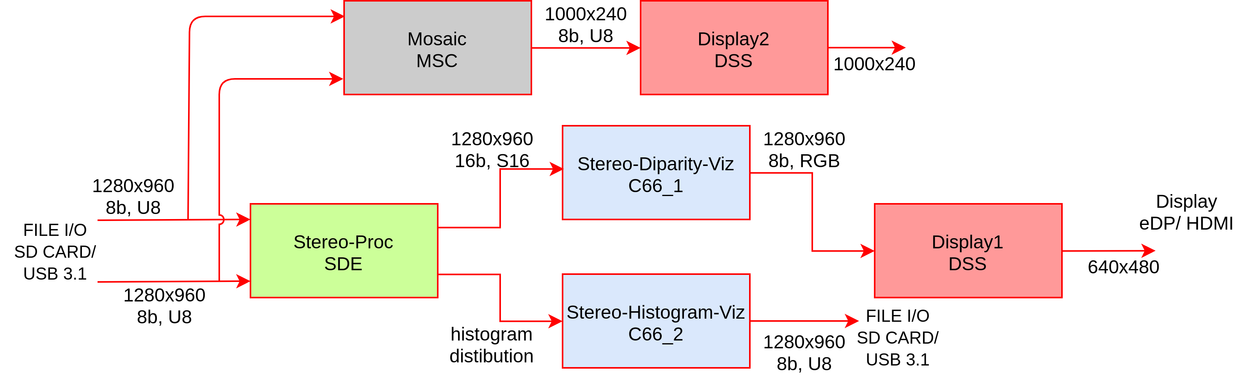
Data flow
Steps to run the application on J7 EVM
- Build the application and related libraries as mentioned in Build Instructions for Linux+RTOS mode
- A sample "app_stereo.cfg" for Stereo Depth with 8b input is provided under "/opt/vision_apps/" on the rootfs partition. Update paths and other fields if necessary.
- A sample "app_stereo_16bit.cfg" for Stereo Depth with 16b input is provided under "/opt/vision_apps/" on the rootfs partition. Update paths and other fields if necessary.
- For 8b input, run the app as shown below
cd /opt/vision_apps
source ./vision_apps_init.sh
./run_app_stereo.sh
- For 16b input, run the app as shown below
cd /opt/vision_apps
source ./vision_apps_init.sh
./run_app_stereo_16bit.sh
- Output will be sent to display.
Steps to run the application on PC Linux x86_64
- Build the application and related libraries as mentioned in Build Instructions for PC emulation mode
- A sample "app.cfg" for Stereo Depth with 8b input is provided under "${PSDKR_PATH}/vision_apps/apps/basic_demos/app_stereo/config" folder.Update paths and other fields if necessary.
- A sample "app_16bit.cfg" for Stereo Depth with 16b input is provided under "${PSDKR_PATH}/vision_apps/apps/basic_demos/app_stereo/config" folder.Update paths and other fields if necessary.
- For 8b input, run the app as shown below
cd ${PSDKR_PATH}/vision_apps/out/PC/x86_64/LINUX/$PROFILE/
./vx_app_stereo_depth --cfg ${PSDKR_PATH}/vision_apps/apps/basic_demos/app_stereo/config/app.cfg
- For 16b input, run the app as shown below
cd ${PSDKR_PATH}/vision_apps/out/PC/x86_64/LINUX/$PROFILE/
./vx_app_stereo_depth --cfg ${PSDKR_PATH}/vision_apps/apps/basic_demos/app_stereo/config/app_16bit.cfg
- Output will be generated as .bmp files in the "output_file_path" folder specified in app.cfg or app_16bit.cfg.
- View the output images in any image viewer
Sample Output
Shown below is a example input and its corresponding output

Left Input
|

Right Input
|
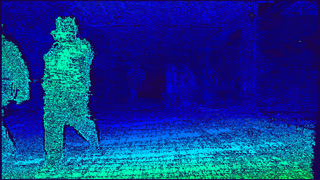
Output Stereo Disparity Map
|
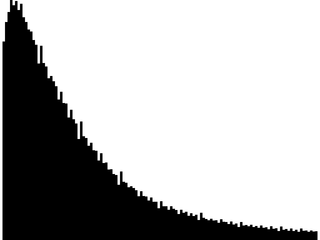
Output Disparity Histogram Map
|
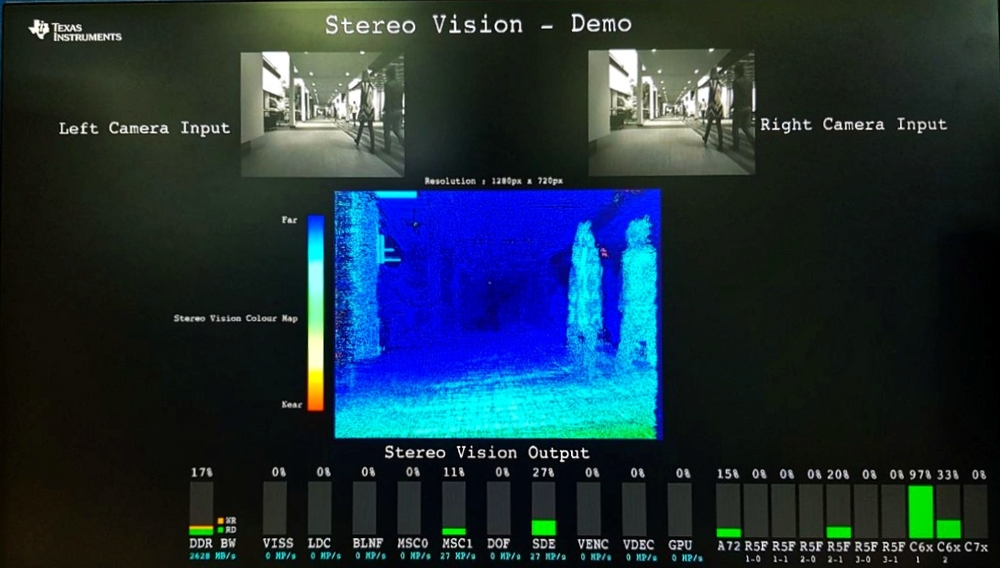
Shown below is a sample display on J7 EVM


 1.8.14
1.8.14