|
Vision Apps User Guide
|


|
|
Vision Apps User Guide
|
|
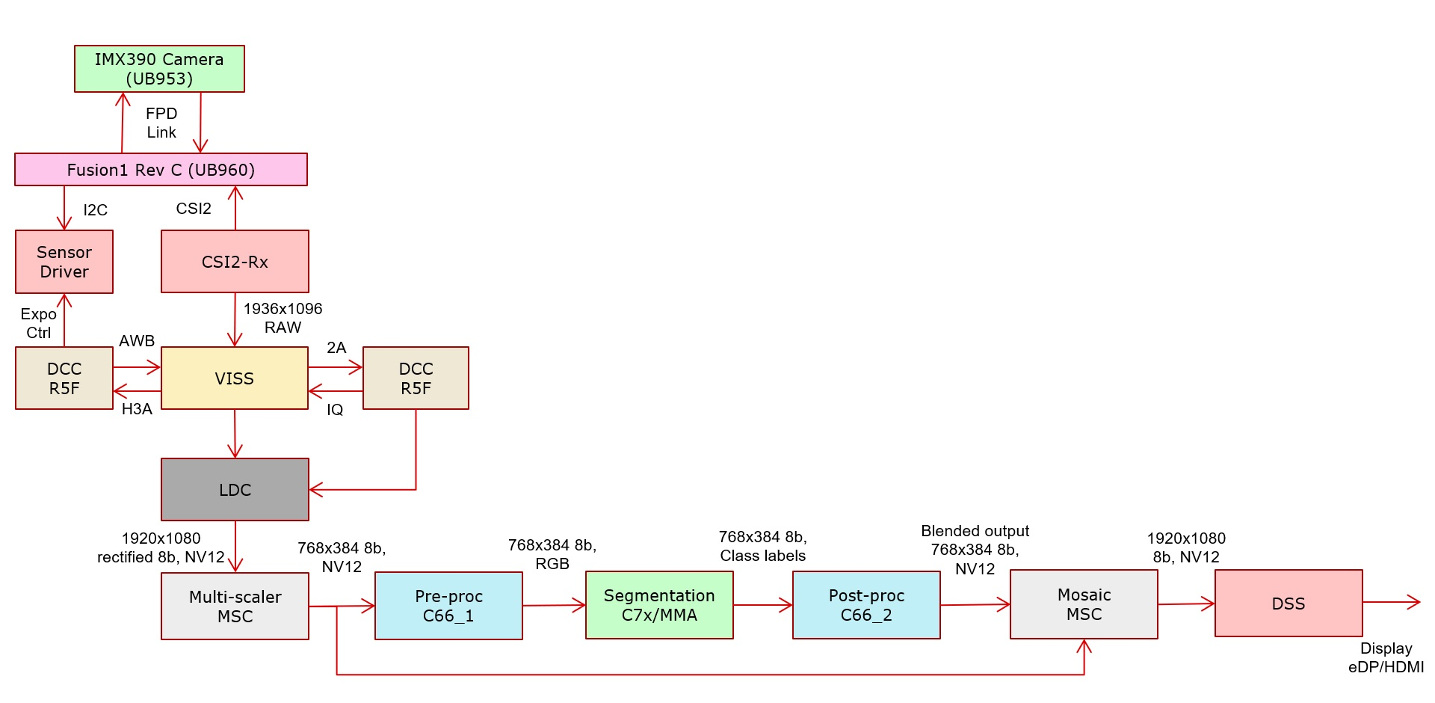
This example shows how to write an OpenVx application which integrates the camera pipeline to TIDL based Semantic Segmentation pipeline. The demo is validated on tiadsegNet_v2 network. Raw pixels from sensor is captured via CSI2Rx and sent to VISS for image processing. The resulting image is written in NV12 format which is then sent to LDC for fish-eye rectification. The rectified image is scaled using MSC to produce a DL resolution of 768x384 as required by the network. As a pre-processing step, the scaled NV12 resolution is converted to RGB format and padded as required on C66x_1 DSP. The pre-processed input is given to TIDL running on C7x DSP for inference. As a post-processing step, the TIDL output is read and each pixel is blended with a color map on the provided image on C66x_2 DSP. The final output is blended with system performance statistics and displayed on a 1920x1080 screen.
| Platform | Linux x86_64 | Linux+RTOS mode | QNX+RTOS mode | SoC |
|---|---|---|---|---|
| Support | NO | YES | YES | J721e / J721S2 / J784S4 |
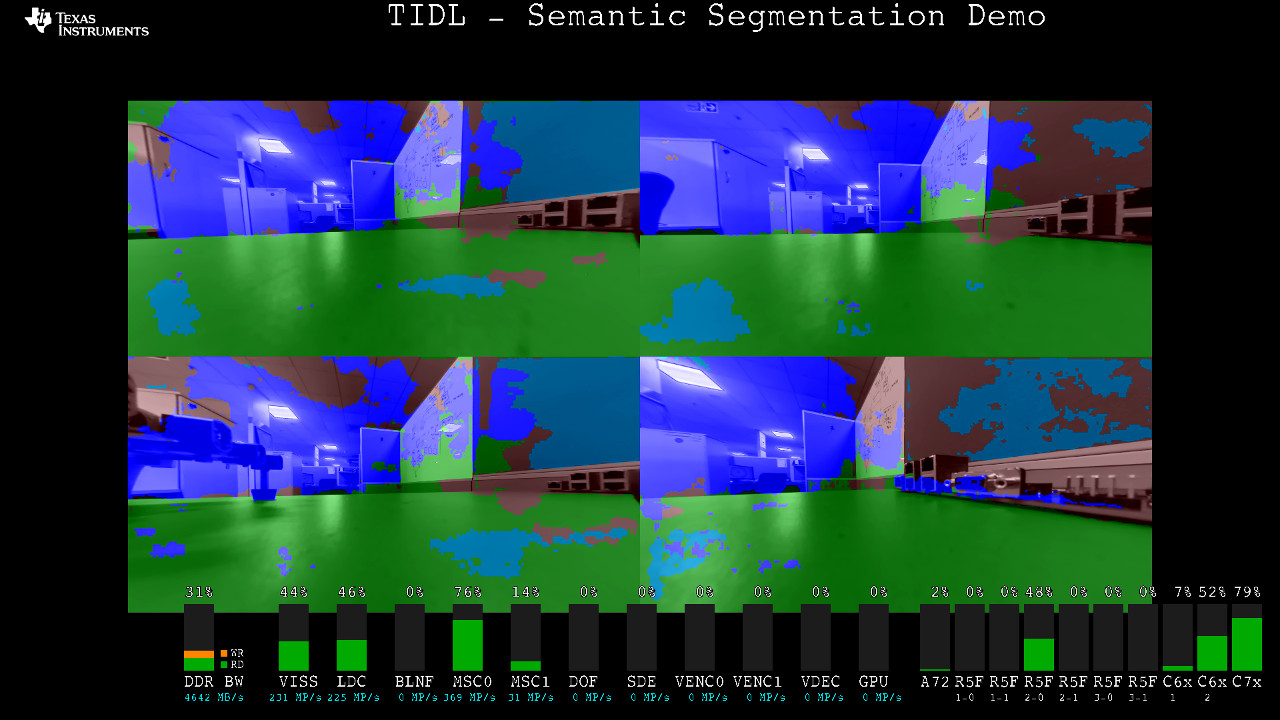
Shown below is a example for running semantic segmentation on 4 IMX390 2MP cameras
 1.8.14
1.8.14